Utils¶
Matrix Utilities¶
-
SimPEG.utils.mat_utils.diagEst(matFun, n, k=None, approach='Probing')[source]¶ Estimate the diagonal of a matrix, A. Note that the matrix may be a function which returns A times a vector.
Three different approaches have been implemented:
Probing: cyclic permutations of vectors with 1’s and 0’s (default)
Ones: random +/- 1 entries
Random: random vectors
- Parameters
- Return type
- Returns
est_diag(A)
Based on Saad http://www-users.cs.umn.edu/~saad/PDF/umsi-2005-082.pdf, and https://www.cita.utoronto.ca/~niels/diagonal.pdf
-
SimPEG.utils.mat_utils.dip_azimuth2cartesian(dip, azm_N)[source]¶ Function converting degree angles for dip and azimuth from north to a 3-components in cartesian coordinates.
INPUT dip : Value or vector of dip from horizontal in DEGREE azm_N : Value or vector of azimuth from north in DEGREE
OUTPUT M : [n-by-3] Array of xyz components of a unit vector in cartesian
Created on Dec, 20th 2015
@author: dominiquef
Solver Utilities¶
-
SimPEG.utils.solver_utils.SolverWrapD(fun, factorize=True, checkAccuracy=True, accuracyTol=1e-06, name=None)[source]¶ Wraps a direct Solver.
import scipy.sparse as sp Solver = solver_utils.SolverWrapD(sp.linalg.spsolve, factorize=False) SolverLU = solver_utils.SolverWrapD(sp.linalg.splu, factorize=True)
Curv Utilities¶
Mesh Utilities¶
Model Builder Utilities¶
-
SimPEG.utils.model_builder.addBlock(gridCC, modelCC, p0, p1, blockProp)[source]¶ Add a block to an exsisting cell centered model, modelCC
- Parameters
gridCC (numpy.ndarray) – mesh.gridCC is the cell centered grid
modelCC (numpy.ndarray) – cell centered model
p0 (numpy.ndarray) – bottom, southwest corner of block
p1 (numpy.ndarray) – top, northeast corner of block
- BlockProp float blockProp
property to assign to the model
- Return numpy.ndarray, modelBlock
model with block
-
SimPEG.utils.model_builder.getIndicesBlock(p0, p1, ccMesh)[source]¶ Creates a vector containing the block indices in the cell centers mesh. Returns a tuple
The block is defined by the points
p0, describe the position of the left upper front corner, and
p1, describe the position of the right bottom back corner.
ccMesh represents the cell-centered mesh
The points p0 and p1 must live in the the same dimensional space as the mesh.
-
SimPEG.utils.model_builder.defineBlock(ccMesh, p0, p1, vals=None)[source]¶ Build a block with the conductivity specified by condVal. Returns an array. vals[0] conductivity of the block vals[1] conductivity of the ground
-
SimPEG.utils.model_builder.defineElipse(ccMesh, center=None, anisotropy=None, slope=10.0, theta=0.0)[source]¶
-
SimPEG.utils.model_builder.getIndicesSphere(center, radius, ccMesh)[source]¶ Creates a vector containing the sphere indices in the cell centers mesh. Returns a tuple
The sphere is defined by the points
p0, describe the position of the center of the cell
r, describe the radius of the sphere.
ccMesh represents the cell-centered mesh
The points p0 must live in the the same dimensional space as the mesh.
-
SimPEG.utils.model_builder.defineTwoLayers(ccMesh, depth, vals=None)[source]¶ Define a two layered model. Depth of the first layer must be specified. CondVals vector with the conductivity values of the layers. Eg:
Convention to number the layers:
<----------------------------|------------------------------------> 0 depth zf 1st layer 2nd layer
-
SimPEG.utils.model_builder.scalarConductivity(ccMesh, pFunction)[source]¶ Define the distribution conductivity in the mesh according to the analytical expression given in pFunction
-
SimPEG.utils.model_builder.layeredModel(ccMesh, layerTops, layerValues)[source]¶ Define a layered model from layerTops (z-positive up)
- Parameters
ccMesh (numpy.ndarray) – cell-centered mesh
layerTops (numpy.ndarray) – z-locations of the tops of each layer
layerValue (numpy.ndarray) – values of the property to assign for each layer (starting at the top)
- Return type
- Returns
M, layered model on the mesh
-
SimPEG.utils.model_builder.randomModel(shape, seed=None, anisotropy=None, its=100, bounds=None)[source]¶ Create a random model by convolving a kernel with a uniformly distributed model.
- Parameters
shape (tuple) – shape of the model.
seed (int) – pick which model to produce, prints the seed if you don’t choose.
anisotropy (numpy.ndarray) – this is the (3 x n) blurring kernel that is used.
its (int) – number of smoothing iterations
bounds (list) – bounds on the model, len(list) == 2
- Return type
- Returns
M, the model
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
SimPEG.utils.model_builder.PolygonInd(mesh, pts)[source]¶ Finde a volxel indices included in mpolygon (2D) or polyhedra (3D) uniformly distributed model.
- Parameters
shape (tuple) – shape of the model.
seed (int) – pick which model to produce, prints the seed if you don’t choose.
anisotropy (numpy.ndarray) – this is the (3 x n) blurring kernel that is used.
its (int) – number of smoothing iterations
bounds (list) – bounds on the model, len(list) == 2
- Return type
- Returns
M, the model
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
Interpolation Utilities¶
-
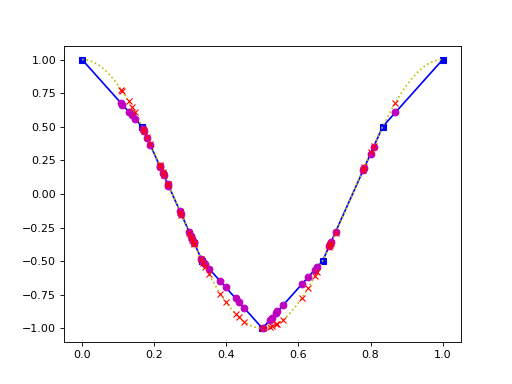
discretize.utils.interputils.interpmat(locs, x, y=None, z=None)[source]¶ Local interpolation computed for each receiver point in turn
- Parameters
loc (numpy.ndarray) – Location of points to interpolate to
x (numpy.ndarray) – Tensor of 1st dimension of grid.
y (numpy.ndarray) – Tensor of 2nd dimension of grid. None by default.
z (numpy.ndarray) – Tensor of 3rd dimension of grid. None by default.
- Return type
- Returns
Interpolation matrix
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
discretize.utils.interputils.volume_average(mesh_in, mesh_out, values=None, output=None)[source]¶ Volume averaging interpolation between meshes.
This volume averaging function looks for overlapping cells in each mesh, and weights the output values by the partial volume ratio of the overlapping input cells. The volume average operation should result in an output such that
np.sum(mesh_in.vol*values)=np.sum(mesh_out.vol*output), when the input and output meshes have the exact same extent. When the output mesh extent goes beyond the input mesh, it is assumed to have constant values in that direction. When the output mesh extent is smaller than the input mesh, only the overlapping extent of the input mesh contributes to the output.This function operates in three different modes. If only
mesh_inandmesh_outare given, the returned value is ascipy.sparse.csr_matrixthat represents this operation (so it could potentially be applied repeatedly). Ifvaluesis given, the volume averaging is performed right away (without internally forming the matrix) and the returned value is the result of this. Ifoutputis given as well, it will be filled with the values of the operation and then returned (assuming it has the correctdtype).- mesh_in: TensorMesh or TreeMesh
Input mesh (the mesh you are interpolating from)
- mesh_out: TensorMesh or TreeMesh
Output mesh (the mesh you are interpolating to)
- values: numpy.ndarray, optional
Array with values defined at the cells of
mesh_in- output: numpy.ndarray, optional
Output array to be overwritten of length
mesh_out.nCand typenp.float64
- scipy.sparse.csr_matrix or numpy.ndarray
If
valuesisNone, the returned value is a matrix representing this operation, otherwise it is a numpy.ndarray of the result of the operation.
Create two meshes with the same extent, but different divisions (the meshes do not have to be the same extent).
>>> import numpy as np >>> from discretize import TensorMesh >>> h1 = np.ones(32) >>> h2 = np.ones(16)*2 >>> mesh_in = TensorMesh([h1, h1]) >>> mesh_out = TensorMesh([h2, h2])
Create a random model defined on the input mesh, and use volume averaging to interpolate it to the output mesh.
>>> from discretize.utils import volume_average >>> model1 = np.random.rand(mesh_in.nC) >>> model2 = volume_average(mesh_in, mesh_out, model1)
Because these two meshes’ cells are perfectly aligned, but the output mesh has 1 cell for each 4 of the input cells, this operation should effectively look like averaging each of those cells values
>>> import matplotlib.pyplot as plt >>> plt.figure() >>> ax1 = plt.subplot(121) >>> mesh_in.plotImage(model1, ax=ax1) >>> ax2 = plt.subplot(122) >>> mesh_out.plotImage(model2, ax=ax2) >>> plt.show()
Counter Utilities¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | class MyClass(object):
def __init__(self, url):
self.counter = Counter()
@count
def MyMethod(self):
pass
@timeIt
def MySecondMethod(self):
pass
c = MyClass('blah')
for i in range(100): c.MyMethod()
for i in range(300): c.MySecondMethod()
c.counter.summary()
|
1 2 3 4 5 | Counters:
MyClass.MyMethod : 100
Times: mean sum
MyClass.MySecondMethod : 1.70e-06, 5.10e-04, 300x
|
The API¶
-
class
SimPEG.utils.counter_utils.Counter[source]¶ Counter allows anything that calls it to record iterations and timings in a simple way.
Also has plotting functions that allow quick recalls of data.
If you want to use this, import count or timeIt and use them as decorators on class methods.
class MyClass(object): def __init__(self, url): self.counter = Counter() @count def MyMethod(self): pass @timeIt def MySecondMethod(self): pass c = MyClass('blah') for i in range(100): c.MyMethod() for i in range(300): c.MySecondMethod() c.counter.summary()